Fluid-flow: Elliptical Bearing#
Study below is based on [Mota, 2020], where is the complete theory used by FluidFlow:
The elliptical bearing or “lemon bearing”, as it is also known, is a variation of the cylindrical bearing with axial groove and reduced clearance in one direction.
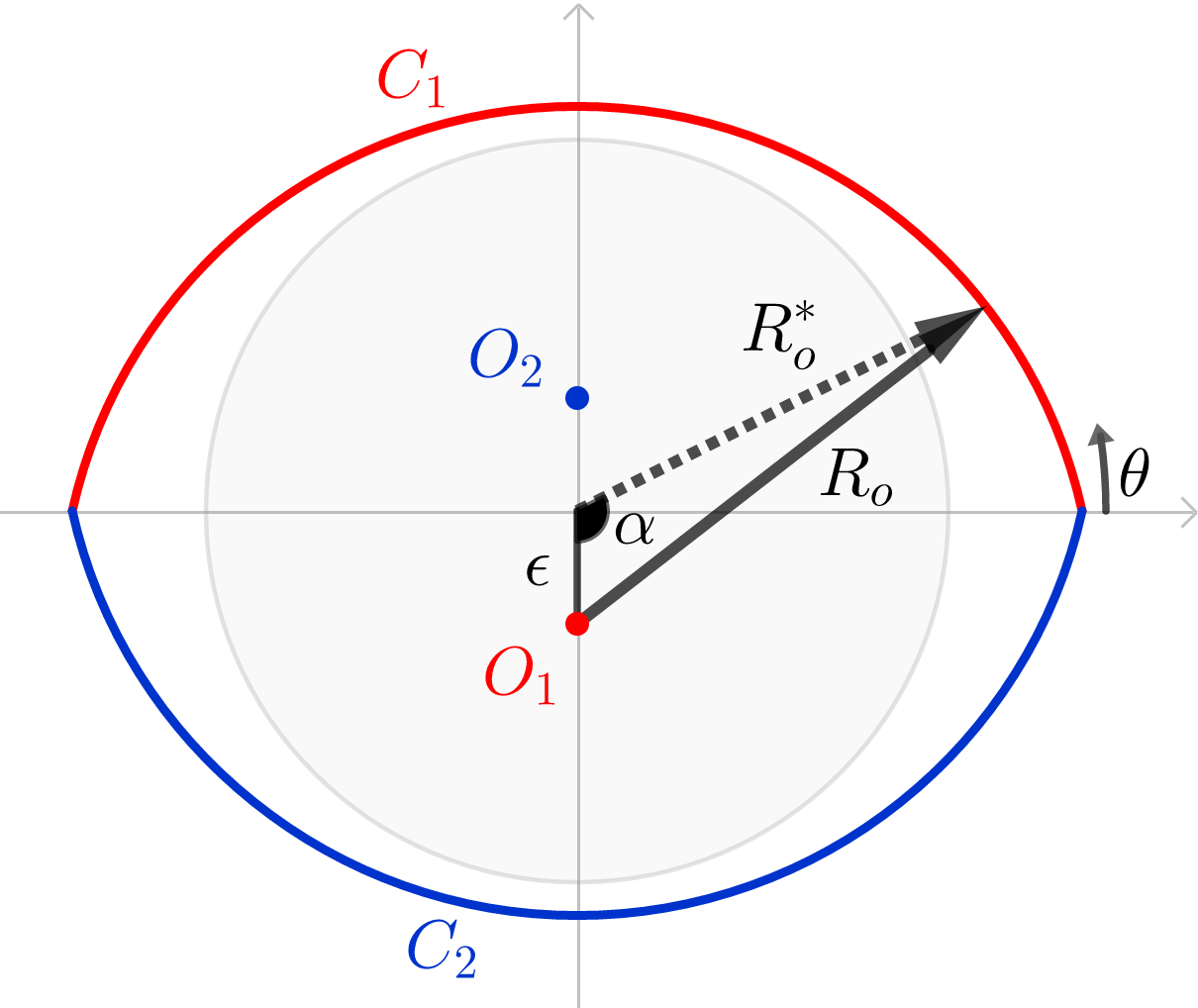
For the inclusion of this new geometry, adaptations to the stator radius are necessary, as it will no longer be constant in \(\theta\). As seen in the figure above, the new stator is composed of the arc \(C_{1}\), with center in \(O_{1}\), joined to the arc \(C_{2}\), centered in \(O_{2}\), both with radius \(R_{o}\). In this new configuration, the centers are at a distance \(\epsilon\) from the origin, called ellipticity.
It is necessary to describe the stator from the origin. This new distance will be called \(R_{o}^{*} \) and it varies along the angular position:
where $\(\alpha =\begin{cases} \pi/2 + \theta \text{,} &\text{if} \quad \theta \in 1^{\circ} \text{quadrant} \\ 3\pi/2 + \theta \text{,} &\text{if} \quad \theta \in 2^{\circ} \text{quadrant} \\ \theta - \pi/2 \text{,} &\text{if} \quad \theta \in 3^{\circ} \text{quadrant} \\ 5\pi/2 -\theta \text{,} &\text{if} \quad \theta \in 4^{\circ} \text{quadrant} \end{cases}\)$ .
Another important parameter to be defined is the \( m \) preload which, in this text, will be established as:
where \(\epsilon\) is the ellipticity and \(F=R_{o}-R_{i}\) is the radial clearance.
For \(m=0\), the bearing becomes cylindrical, while for \(m \rightarrow 1\) the stator arcs tend to touch the axis.
import ross
from ross.bearings.fluid_flow_graphics import (
plot_pressure_theta,
plot_pressure_surface,
)
from ross.bearings.fluid_flow_coefficients import calculate_oil_film_force
from ross.bearings.fluid_flow_coefficients import find_equilibrium_position
from ross.bearings.fluid_flow_coefficients import (
calculate_stiffness_and_damping_coefficients,
)
from ross.bearings.fluid_flow import fluid_flow_example3
import plotly.graph_objects as go
# Make sure the default renderer is set to 'notebook' for inline plots in Jupyter
import plotly.io as pio
pio.renderers.default = "notebook"
my_fluid_flow_eliptical = fluid_flow_example3()
fig1 = plot_pressure_theta(
my_fluid_flow_eliptical, z=int(my_fluid_flow_eliptical.nz / 2)
)
fig1.show()
fig2 = plot_pressure_surface(my_fluid_flow_eliptical)
fig2.show()
radial_force, tangential_force, force_x, force_y = calculate_oil_film_force(
my_fluid_flow_eliptical
)
print("N=", radial_force)
print("T=", tangential_force)
print("fx=", force_x)
print("fy=", force_y)
find_equilibrium_position(my_fluid_flow_eliptical)
print("(xi,yi)=", "(", my_fluid_flow_eliptical.xi, ",", my_fluid_flow_eliptical.yi, ")")
radial_force, tangential_force, force_x, force_y = calculate_oil_film_force(
my_fluid_flow_eliptical
)
print("fx, fy=", force_x, ",", force_y)
K, C = calculate_stiffness_and_damping_coefficients(my_fluid_flow_eliptical)
kxx, kxy, kyx, kyy = K[0], K[1], K[2], K[3]
cxx, cxy, cyx, cyy = C[0], C[1], C[2], C[3]
print("Stiffness coefficients:")
print("kxx, kxy, kyx, kyy = ", kxx, kxy, kyx, kyy)
print("Damping coefficients:")
print("cxx, cxy, cyx, cyy", cxx, cxy, cyx, cyy)
N= 8.077024744991657
T= 99.67327493759437
fx= -6.935547745001713e-07
fy= 100.00000032758243
(xi,yi)= ( 2.4488755349203602e-05 , -1.984446342446739e-06 )
fx, fy= -0.0032713962443260414 , 99.99628600027863
Stiffness coefficients:
kxx, kxy, kyx, kyy = 1411196.449483926 6004153.228912725 -5197683.993469715 6811699.702573299
Damping coefficients:
cxx, cxy, cyx, cyy 36652.41162918563 4976.696889719772 12470.287588817999 54329.07769254781
References#
Júlia de Araújo Mota. Estudo da teoria de lubrificação com parametrização diferenciada da geometria e aplicações em mancais hidrodinâmicos. Master's thesis, PPGI - Universidade Federal do Rio de Janeiro, 2020.